Entre o mês de Agosto e Outubro deste ano realizou-se o curso de verão de Introdução à Robótica para aplicações em Observação do Oceano, à Arqueologia e ao Mapeamento de Ecossistemas, organizado pelo Laboratório de Sistemas e Tecnologia Subaquática (LSTS) e pelo AIR Centre, financiado pela FCT.
No âmbito dos projectos de final do curso de verão, foi concebido um protótipo de amostragem para Veículos Autónomos Subaquáticos (AUVs) por um grupo multidisciplinar de alunos que frequentaram o curso.
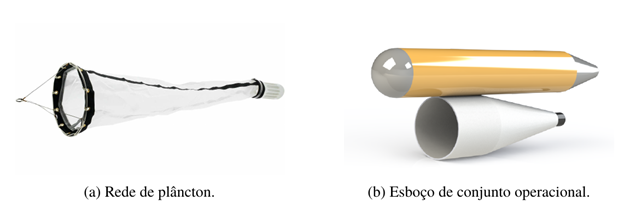
O projeto intitulado: Mecanismo de Abertura e Fecho de Rede Plankton - Implementação em Veículos Autónomos Subaquáticos propõe um mecanismo de amostragem de água através do manuseamento de redes. Esse conceito foi concebido para ser implementado, numa fase inicial, numa plataforma de testes. Foi feito também um estudo conceptual da sua implementação num LAUV para amostragem de forma autónoma em operações.
A solução apresentada tinha como objetivo tornar o processo de amostragem remoto, conferindo-lhe maior autonomia e flexibilidade.
Para a validação experimental do protótipo mecânico apresentado para a plataforma de teste, foi ainda implementado a infraestrutura eletrónica, um controlador com a lógica de amostragem e a comunicação com o DUNE, software de bordo dos LAUVs.
Este trabalho teve a orientação da equipa do LSTS.
--------------------------------------------------------------------
Between August to October of this year, took place the summer course on Marine Robotics is funded by the Portuguese Foundation of Science and Technology (FCT) and organized by the Laboratório de Sistemas e Tecnologia Subaquática (LSTS) from the University of Porto and the AIR Centre, funded by FCT.
Within the scope of the final projects for this summer course, a sampling prototype was conceived for Autonomous Underwater Vehicles (AUVs) by a multidisciplinary group of students that attended the course.
The project entitled: Opening and Closing Mechanisms for Plankton Net - Implementation in Autonomous Underwater Vehicles, proposes a water sampling mechanism through nets handling. This concept was designed to be implemented, in an initial phase, on a testing platform. A conceptual study was also carried out of its implementation in an LAUV for autonomous sampling in operations.
The solution presented was intended to make the sampling process remote, giving it greater autonomy and flexibility.
For the experimental validation of the mechanical prototype presented for the test platform, it was also implemented the electronic infrastructure, a controller with the sampling logic and the communication with DUNE, on-board software of the LAUVs.
This work was mentored by the LSTS team.